
Walser Pistenraupen Modellbau
Bei der Planung eines Raupenmodells stellt sich gleich mal die Frage: "Welchen Motor soll ich nehmen?" oder "Reicht dieser oder jener Motor für meine Raupe?", deshalb hier mal die physikalischen Grundlagen dazu.
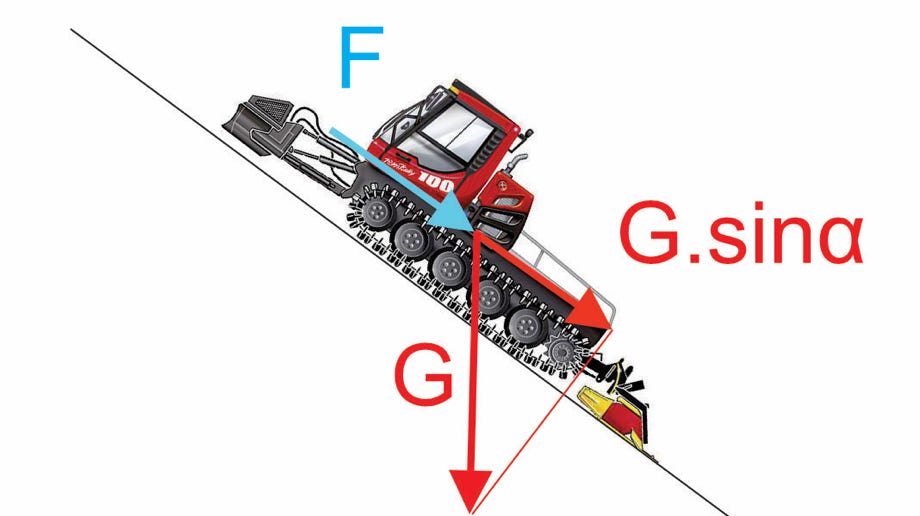
So schauen die Kräfte aus bei einer Pistenraupe in Hangfahrt bei gleichbleibender Geschwindigkeit:
G = Gewicht der Raupe, wirkt nach unten
G * sin alpha = Gewichtsanteil in Fahrtrichtung, alpha = Steigungswinkel (Hangneigung)
F = Fahrtwiderstand der Raupe, also Widerstände im Antrieb und im Schnee
Das Gewicht der Raupe lässt sich auf einer Waage leicht bestimmen, anders schaut es mit dem Fahrwiderstand aus. Hierzu haben wir Messungen gemacht. Der Scaleart Commander Sender zeigt am Display per Telemetrie den aktuellen Stromverbrauch im Modell an. Daraus kann man den Widerstand ausrechnen. Unser PB600 auf Graupnerbasis mit Aluketten braucht etwa 6 Ampere bei 7 Volt auf ebener Strecke im Tiefschnee (siehe Foto). Der Wirkungsgrad vom original Graupner Motor ist eher bescheiden, bei gleichartigen Billigmotoren ist er mit 50% angegeben. Damit errechnet sich der Fahrwiderstand zu etwa 21 Watt. Darin ist auch bereits der Verlust im Getriebe enthalten.
Leistung = Volt * Ampere, also 6 x 7 = 42 Watt, 42 x 0.5 = 21 Watt
Für das Rechenbeispiel haben wir eine typische 1:12 Raupe hergenommen mit 5 kg Gewicht (= 49 N).
Den Fahrtwiderstand nehmen wir wie gemessen mit 21 Watt an. Die Geschwindigkeit ist 0,5 m/sec, das entspricht 21.6 km/h beim Original. Steigungswinkel = 45°, das sind 100% Steigung, also schon sausteil. Da wird auch das Original kaum ohne Winde raufkommen. Der Sinus von 45° = 0.7
Leistung = Kraft x Geschwindigkeit (statt "x" für "mal" verwendet man in Formeln meist "*")
Leistung = G * sin alpha * v + Fahrwiderstandsleistung
Leistung = 49 * 0.7 * 0.5 + 21 = 38 Watt
Für das Moment gilt: Leistung = Moment * Drehzahl, also ergibt sich das Moment = Leistung / 2*Pi*Drehzahl, wobei die Drehzahl in U/sec angegeben sein muss.
Mit einer übrigens für alle Maßstäbe gültigen Sternrad-Drehzahl von ca. 240 U/min (= 4 U/sec) ergibt sich das Moment zu 38 / (2 * 3.14 * 4) = 1.5 Nm.
Das Motormoment wäre dann diese 1.5 Nm geteilt durch die Getriebeuntersetzung, also zB bei einem 1:25 Getriebe wären das 0.06 Nm oder 6 Ncm. Nachdem wir aber 2 Motoren haben, muss jeder Motor nur die Hälfte an Moment erbringen, also 3 Ncm.
Der Fahrwiderstand kann natürlich je nach verwendetem Motor und Getriebe unterschiedlich sein, und wahrscheinlich sogar niedriger als wie beim betagten Graupner Fahrgestell. Messungen an unserem PB400 ParkPro mit hocheffizienten Maxon-Getriebemotoren und Pistenking-Flexwellenantrieb ergaben etwa den gleichen Leistungsbedarf aus der Batterie mit 45 Watt, allerdings werden davon bei einem Wirkungsgrad von 90% etwa 40 Watt für den Vortrieb verwendet. Das ist fast doppelt so viel wie beim Graupner. Allerdings ist das Modell schwerer und die Ketten sind breiter.
Weiters wird man im Schnee kaum die 100% Steigung schaffen, also auch das ist eine "worst case" Annahme. Das heißt, mit diesen Zahlen liegt man eher auf der sicheren Seite.




Copyright © 2011-2026 Walser Pistenraupenmodellbau
Diese Seite verwendet Cookies. Sie stimmen der Verwendung von Cookies durch Anklicken von “OK” zu. Nähere Informationen finden Sie in unseren Datenschutzbestimmungen.
This page is using Cookies. You are permitting the use of cookies by clicking on “OK”. More information can be found at our Privacy Protection.
