
Walser Pistenraupen Modellbau
As my PB400 ParkPro 4F can’t make it up the slope behind the house in fresh snow, I had the plan to equip it with a winch for quite some time. And when I saw a picture of an original PB400 W with a Switchblade, and even with a black arm which fits it perfectly, I finally started planing it.
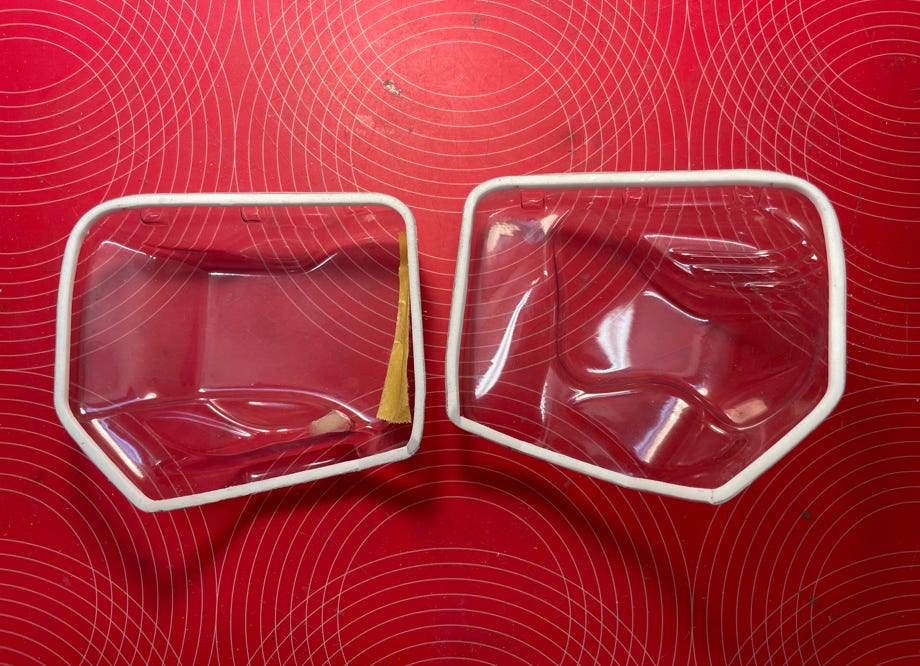
A kit for a 4.0 ton winch has been lying around with me for ages, after all, the covers are made by me. With the introduction of the active winch all winches got a new, reinforced arm, which can be recognized by its rounder shape. Incidentally, this arm is installed in all 4.5 ton winches. And as Pistenking is offering a kit also of this winch, I ordered the arm together with the new winch base and the other accessories. So there wasn’t much left of the original kit, which I could still use. Fortunately the new arm fits also on the 4.0 ton winch without problems.



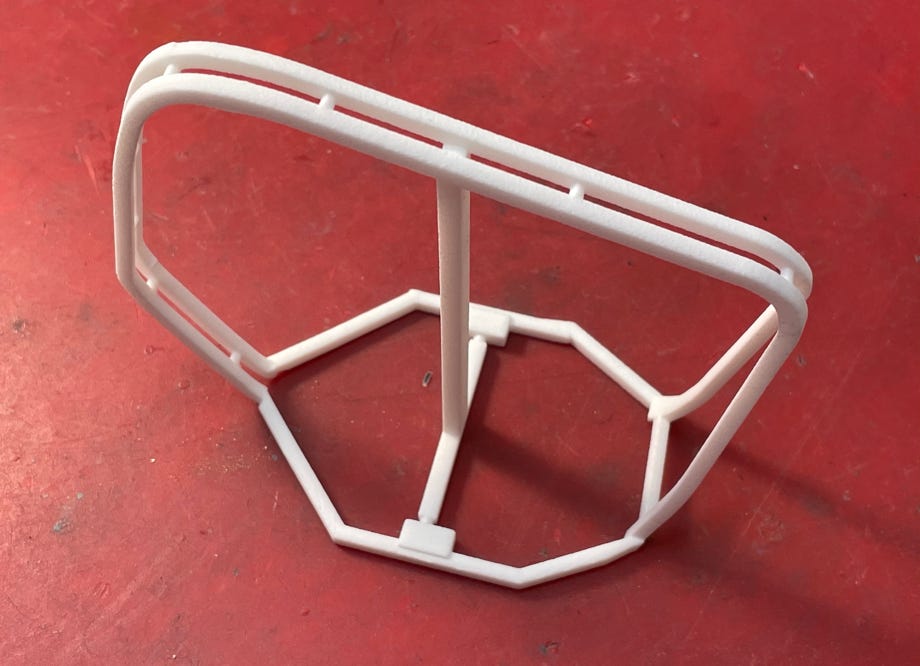
Bending the sheet metal for the arm is a challenge, but luckily it worked straight away. I glued the parts in several stages with UHU plus endfest 300 in the oven, which facilitates precise positioning. For the covers, I implemented Melvin Müller's suggestion and designed reinforcement frames that I had printed out of nylon.


The winch itself should of course be functional, otherwise I wouldn't be able to climb the said slope. There are only a handful of model builders who have implemented a powered winch. Many thanks to Adrian Humbel and Melvin Müller for their valuable tips.
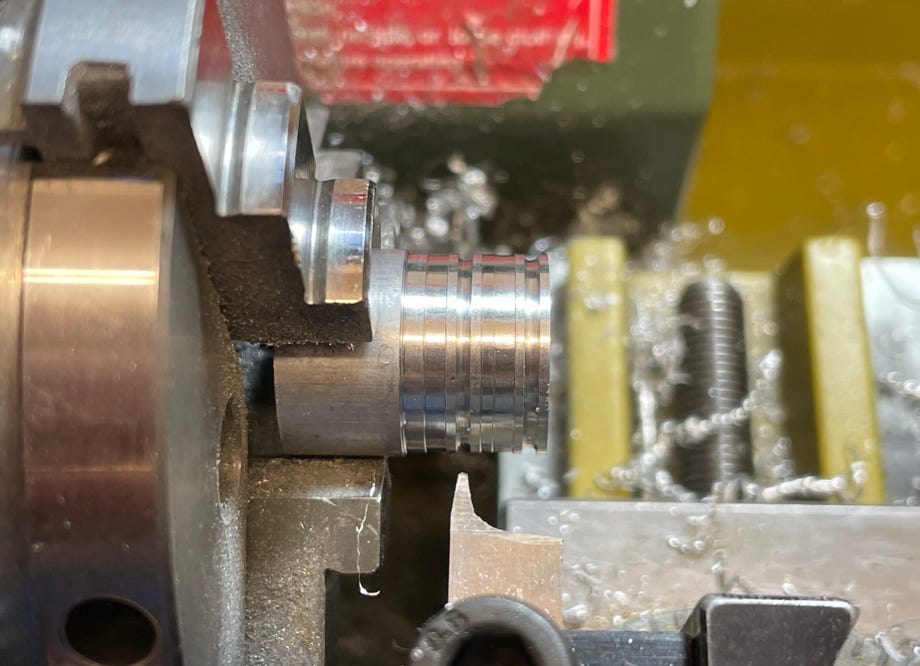
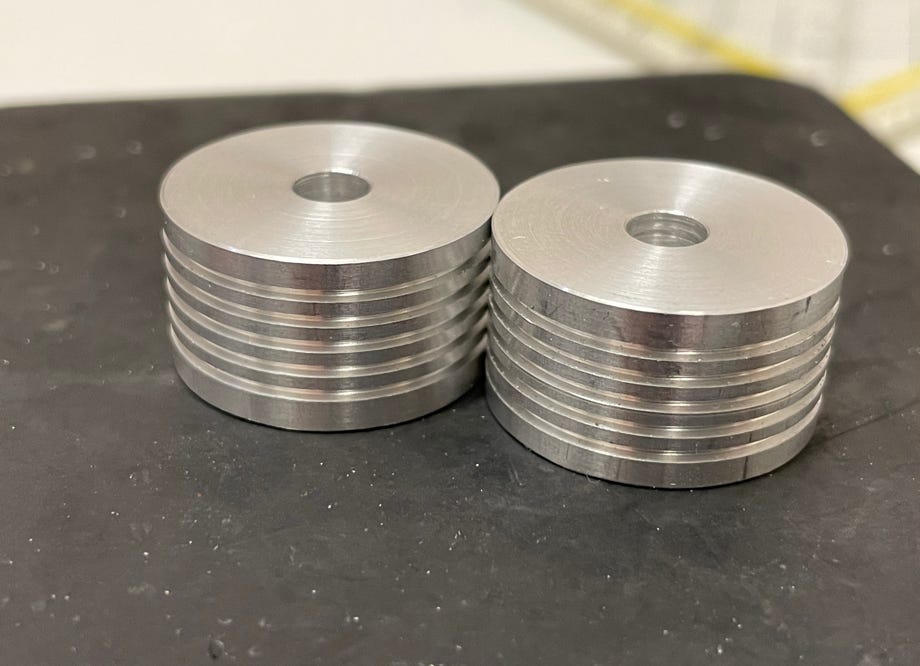
Many hours of planning went into the CAD model before I was able to order the one-piece winch frame as a printed part. I ground a special turning tool to turn the grooves in the cable wheels and the capstan head.
The frame is based on the original and fits perfectly into the housing of the winch, in places it is very tight under the covers. During the planning, it was an advantage that I still had the CAD models for the covers.
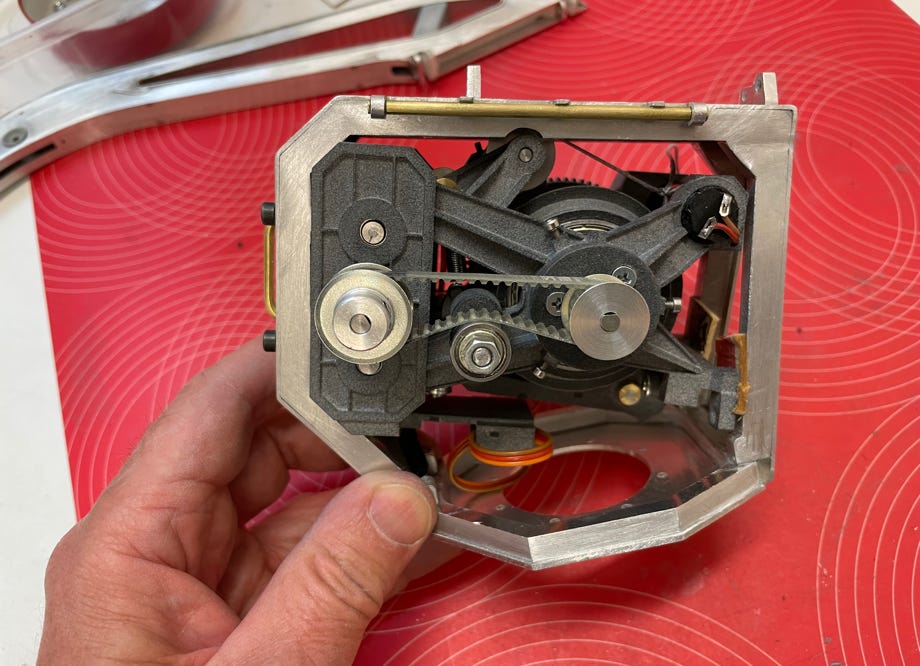
First I had a capstan head drive in mind, whereas he capstan head is driven by a gear motor via a toothed belt, which is located inside the drum. The drum itself is then driven by a smaller gear motor via a pinion (see pictures below). But it turned out that I could not get the required speed differences between capstan head and drum under control with this concept. A “rope salad” quickly ended each test on the test bed. After that the winch mostly had to be disassembled and the rope newly threaded into the capstan head. Therefore I gave up after many iterations and changes and designed a direct drive for the drum. I kept the capstan head for rope guidance, otherwise I would have had to start basically from scratch with the frame.
The winch has an electronic rope force control, whereby the rope force can be adjusted via the remote control.
I am using a Dyneema rope that comes from the fishing industry. These are very strong and do not stretch, after a little searching I found a gray rope with the correct diameter, which corresponds well to the steel rope of the original.
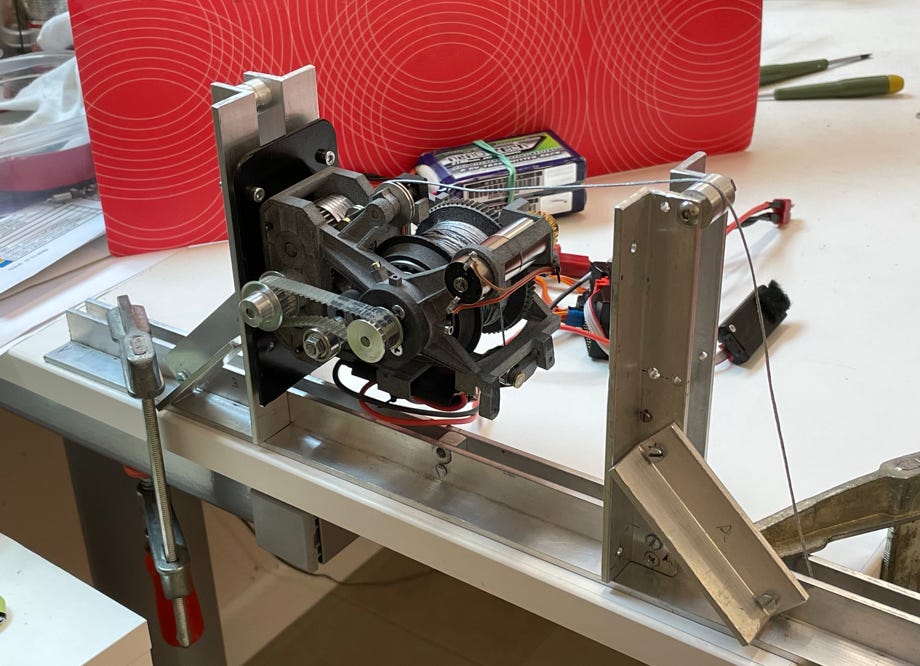
In the picture above you can see the winch test bench, and anyone familiar with this website will recognize the hydraulic test bench, which I quickly adapted for this purpose. The measured rope force is 45 N, which in terms of scale corresponds well to the 4 tons of the original. The winch develops quite a lot of power, it easily pulls the snow cat over the workshop floor with blocked tracks! It now weights 7,5 kg!
On New Year’s Day 2022 finally the long awaited snow came. I could do the first test under real conditions. Everything worked flawlessly. In this deep snow maximum force was needed always. Without the winch I never would have made it up that hill.
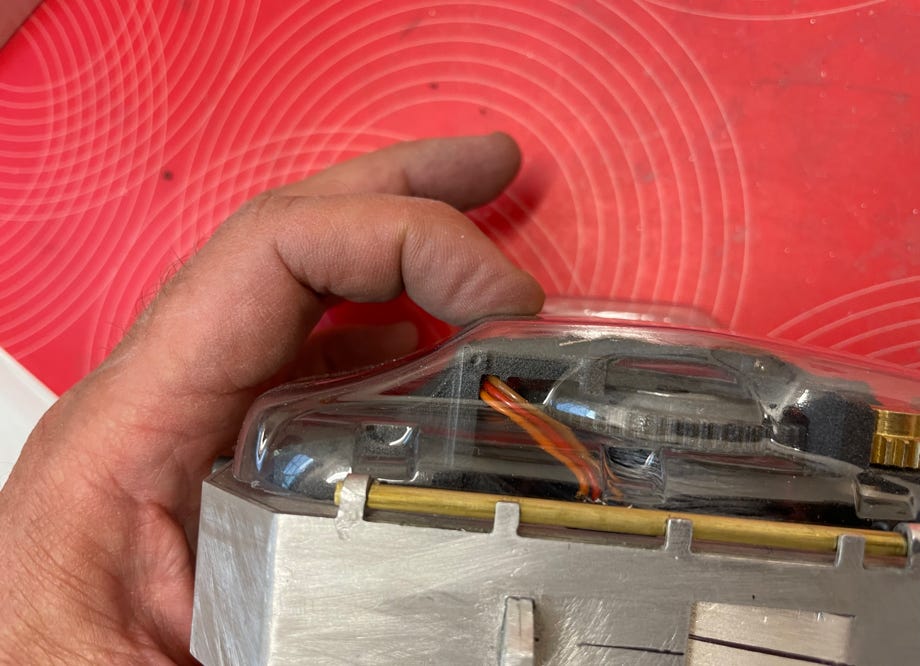
There is not much space left behind the cover.
First concept with a capstan head drive
Winch test bed
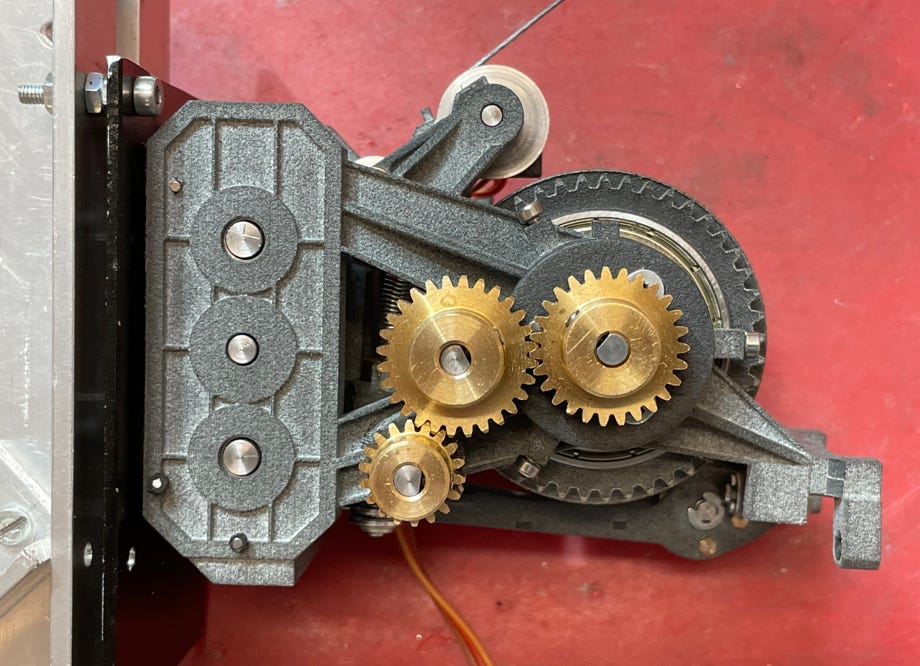
Winch with directly driven drum

Diese Seite verwendet Cookies. Sie stimmen der Verwendung von Cookies durch Anklicken von “OK” zu. Nähere Informationen finden Sie in unseren Datenschutzbestimmungen.
This page is using Cookies. You are permitting the use of cookies by clicking on “OK”. More information can be found at our Privacy Protection.






